Artificial Intelligence and Autonomous Systems
ISSN: 2959-0744 (Print)
ISSN: 2959-0752 (Online)
CODEN: AIASBB
About This Journal
Latest Articles
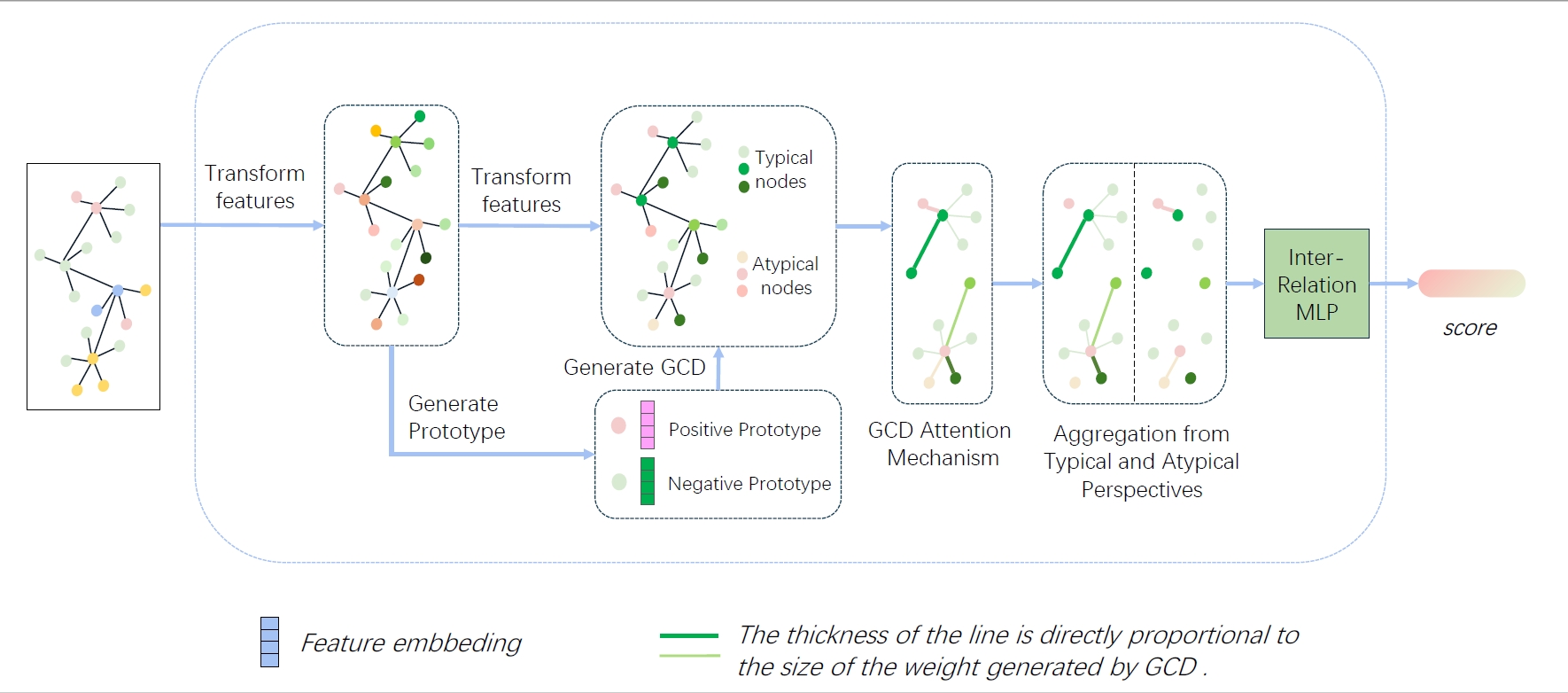
Global confidence degree based graph neural network for financial fraud detection
Published: 25 Apr, 2025

Editor's Choice
Global confidence degree based graph neural network for financial fraud detection
Published: 25 Apr, 2025
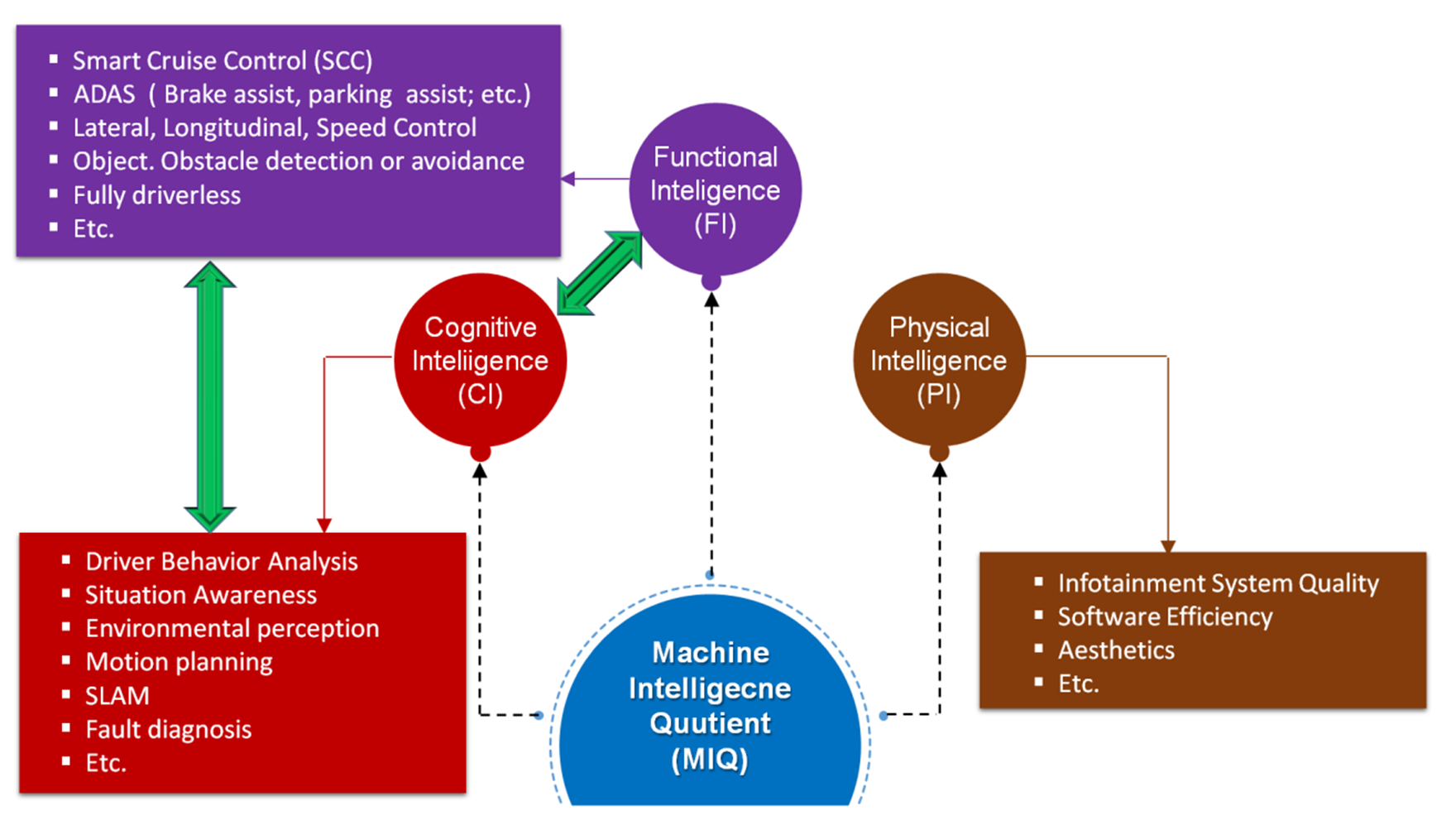
Autonomous and sustainable machine learning: pursuing new horizons of intelligent systems
Published: 10 May, 2023
Top Downloaded